產品說明1

Arducam 2MP*2 立體相機 雙 OV2311 單色全局快門相機模塊 B0264
Arducam 2MP*2 Stereo Camera for Raspberry Pi, Nvidia Jetson Nano/Xavier NX, Dual OV2311 Monochrome Global Shutter Camera Module
用於樹莓派的 Arducam 2MP*2 立體相機、Nvidia Jetson Nano/Xavier NX、雙 OV2311 單色全局快門相機模塊
Package Including:
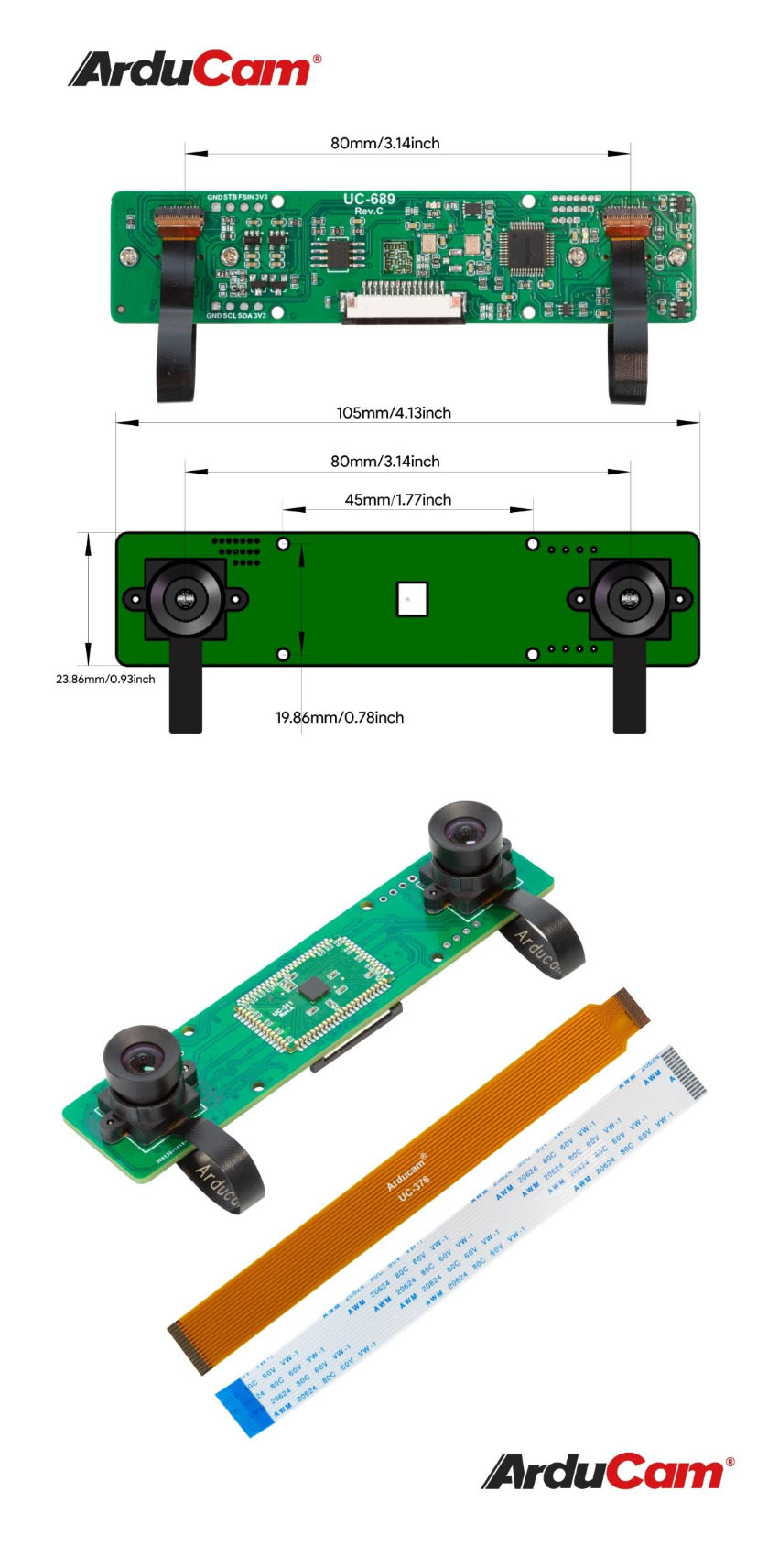
- 1 pcs Arducam 2MP OV2311 Stereo MIPI Camera Module with low distortion M12 Mount Lens
- 1 pcs 150mm 15pin 1.0mm pitch FPC cable
- 1 pcs 150mm 15pin 1.0mm to 22pin 0.5mm pitch FPC cable

Item Description(商品描述):
Stereo vision systems give the robots depth perception skills, which make artificial machines and systems develop an understanding of their environment by estimating the relative distance of objects in their vision from many visual cues. Hence, stereo vision are used in many areas of robotics, such as self-driving cars, drones for rescue missions, robots for remote surgery.
立體視覺系統賦予機器人深度感知技能,這使得人造機器和系統通過從許多視覺線索估計它們視覺中物體的相對距離來了解它們的環境。因此,立體視覺被用於機器人技術的許多領域,例如自動駕駛汽車、用於救援任務的無人機、用於遠程手術的機器人。
Arducam released this Stereo Camera MIPI Module Series for Raspberry Pi and Jetson Nano/Xavier NX. They directly connect to the MIPI CSI-2 connectors of the motherboards, and run with a V4L2 camera driver on those platforms. They offer better flexibility to be integrated into your own hardware design or run with your own algorithm on embedded systems for applications like depth sensing, 3d mapping, SLAM, etc.
Arducam 發布了適用於 Raspberry Pi 和 Jetson Nano/Xavier NX 的立體相機 MIPI 模塊系列。它們直接連接到主板的 MIPI CSI-2 連接器,並在這些平台上與 V4L2 攝像頭驅動程序一起運行。它們提供了更好的靈活性,可以集成到您自己的硬件設計中,或在嵌入式系統上使用您自己的算法運行,用於深度感應、3d 映射、SLAM 等應用。
This Arducam 2MP Stereo Camera MIPI Module is a stereo camera module with two synchronized monochrome global shutter OV2311 image sensors (2x2MP). The monochrome sensor's capable of excellent detail and sensitivity allow it to get higher accuracy and frame rates in extracting depth information.
這款 Arducam 2MP 立體相機 MIPI 模塊是一個立體相機模塊,帶有兩個同步的單色全局快門 OV2311 圖像傳感器 (2x2MP)。單色傳感器具有出色的細節和靈敏度,使其能夠在提取深度信息時獲得更高的精度和幀率。
Note:
- Raspberry Pi & Jetson Nano/Xavier NX motherboards, acrylic case and tripod are not included in the package.
- Contact us to get 3D files of this camera module and case.
Key Specifications(主要規格):
- Sensor: Dual Monochrome global shutter OV2311 (傳感器:雙單色全局快門OV2311)
- Pixel Size: 3 μm x 3 μm (像素尺寸:3 μm x 3 μm)
- Active Array Size: 1600 x 1300 (有源陣列大小:1600 x 1300)
- Optical Size: 1/2.9 inch (光學尺寸:1/2.9 英寸)
- Focus Type: Fixed focus (對焦類型:定焦)
- Focusing Range: 30mm ~ infinite (對焦範圍:30mm~無限遠)
- Output Interface: 2-lane MIPI serial output(輸出接口:2-lane MIPI串行輸出)
- Output Formats: 8-bit/10-bit RAW (輸出格式:8-bit/10-bit RAW)
- Maximum Image Transfer Rate: 2*30fps@1600 x 1300
(最大圖像傳輸速率:2* 30fps@1600 x 1300) - Lens: Default low distortion M12 lens (Part Number: M27280M07S)
(鏡頭:默認低失真 M12 鏡頭(部件號:M27280M07S)) - EFL: 2.8, F.NO: 2.8, HFOV: 83 Deg. ( EFL:2.8,F.NO:2.8,HFOV:83 度)
- IR Sensitivity: Sensitive to IR, No IR filter (紅外靈敏度:對紅外敏感,無紅外濾光片)
- Board Size: 105(L) x 24(W) x 20.1(H) mm (板尺寸:105(L) x 24(W) x 20.1(H) mm)
相關文件
Documentation:
VIDEO:
Jetson Xavier NX Lesson 1: Introduction and First Boot for Beginners:
Jetson Xavier NX 第 1 課:初學者入門和首次啟動:
https://youtu.be/LuWYXKrQcJ8
Camarray: Stereo Vision Solutions for Embedded Systems (Pi, Jetson Nano/Xavier NX and more):
Camarray:嵌入式系統立體視覺解決方案(Pi、Jetson Nano/Xavier NX 等):
https://youtu.be/wPNXggwLb2U















