產品說明2


配送清單

產品簡介
Roboticfan關於SRF08、URM37和MB7067的測評。
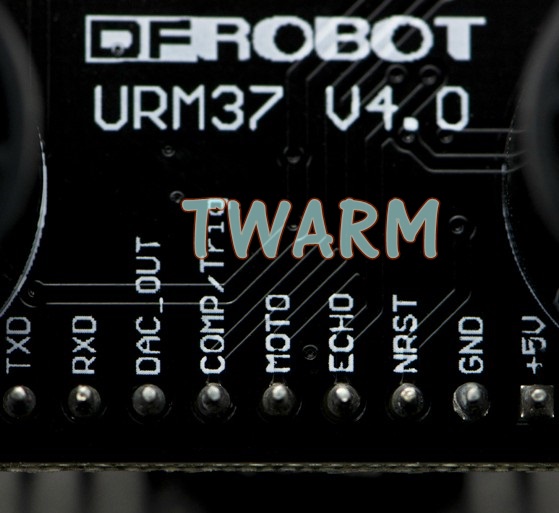
當前版本URM37 V4.0具有更好的智能功能,機械尺寸與引腳接口以
及通信命令兼容V3.2,在V3.2基礎上做瞭如下更改:
- 串口電平選擇由原來的跳針方式改為通過按鍵設置,用戶可以輕鬆的選擇TTL電平輸出或是RS232電平輸出(重啟之後模式生效)。
- 修改了測距算法,使測量盲區減小,精度提高。
- 具有模擬電壓輸出功能,電壓和測量距離正比。
- 寬電壓支持+3.3V-5.0V。
- 具有電源接反保護功能。
- 自動測量時間間隔可修改。
- 修改舵機控制角度為0-180,兼容市面大部分舵機。
- 測量時長為100ms。
這是一款來自DFRobot獨立研發的超聲波測距傳感器。這個傳感器的設計支持多個連接的同時使用,可用於測量對動態或靜態目標之間距離。根據其數據穩定,支持多種接口並且響應性好的特性,一般我們將其應用在機器人移動平台上。這款傳感器的設計基於聲納原理。通過監測發射一連串調製後的超聲波及其回波的時間差來得知傳感器與目標物體間的距離值。
URM37 v3.2超聲波傳感器使用工業級的AVR控制器作為主控單元。內置溫度傳感器輔助校正距離值,幫助您獲得穩定準確的數據。這款傳感器支持三種輸出接口(PWM,RS232或者TTL),使其能兼容大部分的其他控制設備或者係統應用。此外,這款超聲波還提供了一個舵機輸出接口,使您可以在將其與舵機搭配應用時完成周向障礙掃描的功能。
超聲波傳感器選型手冊,請點擊此處下載。
技術規格
- 工作電源:+3.3V~+5.0V
- 工作電流:<20mA
- 工作溫度範圍:-10℃~+70℃
- 超聲波距離測量:5~500cm
- 分辨率:1cm
- 精度:1%
- 測量間隔:100ms
- EEPROM:253字節
- 通訊接口支持:PWM輸出/RS232信號輸出/TTL電平輸出
- 尺寸:22mm × 51 mm
- 重量:25g


相關文檔















