產品說明0
SDB V2.0機器人ARM傳感器驅動板 快速構建機器人系統
簡介
SDB傳感器驅動板作為主控板和傳感器之間的橋樑,在整個系統中非常重要。通過SDB 傳感器驅動板,可以將以上接口的所有傳感器數據採集回來,通過RS23串口發送給主控PC或者嵌入式系統。同時SDB板也帶兩路直流電機驅動,具備兩路旋轉編碼器接口,內帶PID電機控制算法。主控可通過串口精確控制兩路電機速度。SDB板的IO0到IO7可設置為舵機控制口,這在機器人系統內帶例如舵機雲台,機械手夾持的情況下是非常有用的。物理尺寸兼容PC104安裝孔,在其上面可以方便疊加PC104工控板。
SDB直接支持的傳感器有:
1.I2C總線通訊協議的傳感器:Devantech公司的SRF04 / SRF05 / SRF08 / SRF10 超聲波傳感器,SP03 TTS,CMP03電子羅盤等。
2.RS485總線傳感器,例如URM04超聲波,ADIO擴展板等。
3.SPI接口。
4.CAN工業總線接口。
5.模擬量輸出傳感器:GP2D12等紅外距離傳感器,IDG300陀螺儀傳感器,加速度傳感器,光敏傳感器等。
6.開關量輸出的傳感器,例如紅外開關,碰撞模塊,跌落傳感器等。
技術規格
- 工作電源:內帶穩壓電路,寬工作電壓6V-12V(極限電壓15V)
- 工作電流:150mA(供電電壓12V)
- 工作溫度範圍:-10~+70℃
- 使用Cortex-M3內核ARM 32BIT處理器,運算速度90MIPS,總線間通信均採用DMA(存儲器直接訪問)方式,通信和處理速度更快
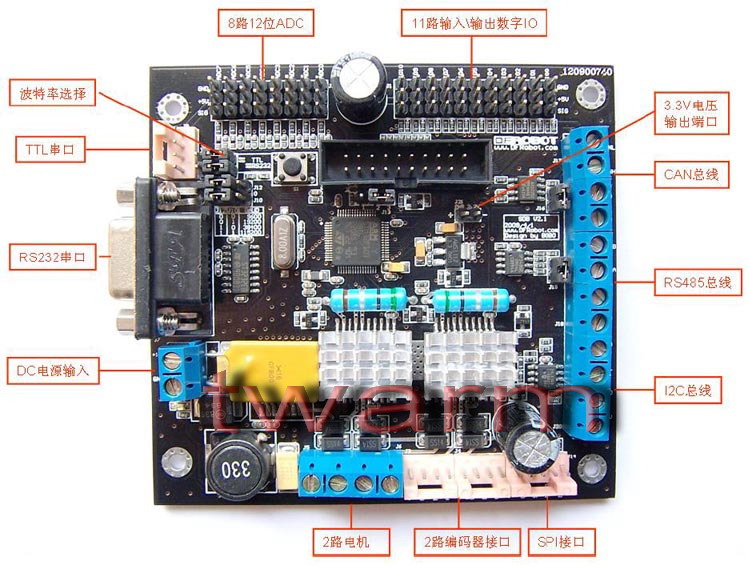
- 與主控通信接口方式:RS232串口或者TTL電平串口。波特率可設置為9600、19200、38400和115200BPS
- 具備8路12BIT高精度模數轉換
- 11路數字輸入/輸出接口,其中8路(IO0-IO7)可設置為舵機控制口
- 8路舵機控制口可控制舵機的度數及其旋轉速度
- 1路I2C總線
- 1路RS485總線
- 1路CAN總線(2.2版本未使用)
- 1路SPI總線(2.2版本未使用)
- 兩路直流電機控制,每通道4A電流,具有AB兩相旋轉編碼器接口,內部集成參數可調整的PID算法,可精確控制電機轉速。可讀取回電機旋轉圈數用於里程計數。電機電流可讀取,可用於電流保護
- 尺寸:長96mm,寬90mm,高20mm。安裝孔兼容PC104結構。
- 重量:約87g
配送清單
相關文檔















