產品說明0
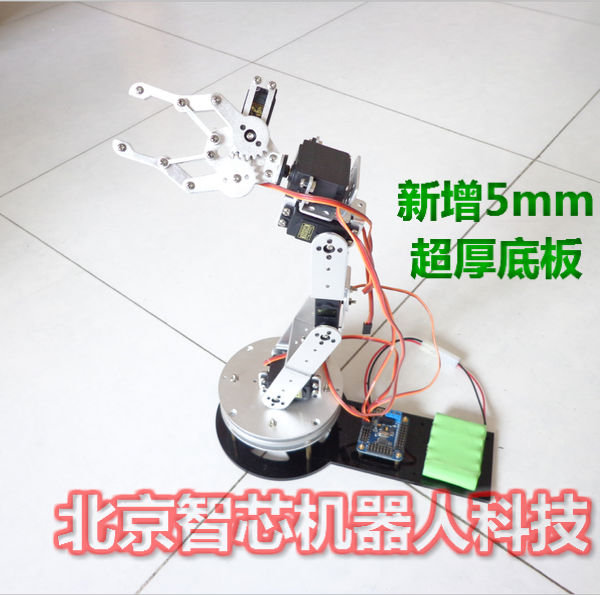
Arduino 金屬 機械臂 攝像頭 攝影 底盤 轉盤 轉台 配金屬舵機 (底座+180度輝盛996R舵機)
(A.底座+180度輝盛996R舵機 X1 )
(B.加購(回購):180度輝盛996舵機X1+支架) PS.不附螺絲,原本套餐裡有多~
(C.整組:底座+180度輝盛996R舵機 X1 + 996舵機X1+支架)

這款寶貝承載力大、轉動非常靈活,對電機力矩要求很小。一方面可以作為機械臂旋轉底座,是性價比的專業級機械臂雲台;另一方面可單獨作為重載轉動雲台,許多朋友單獨用其製作電動程控全景攝影、照相雲台。
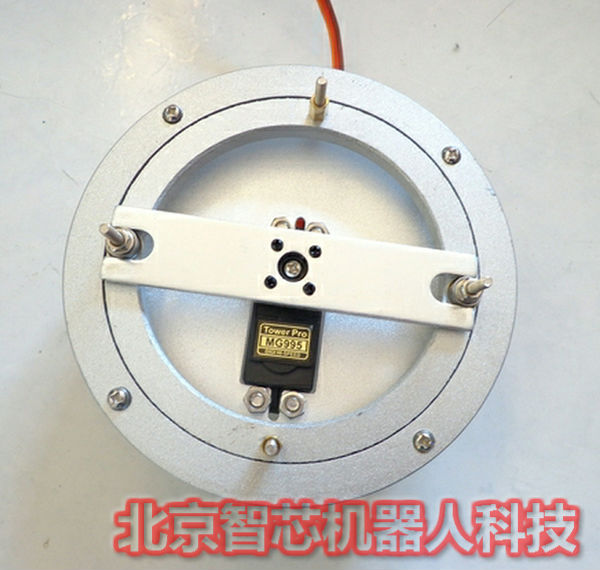
金屬機械臂底盤使用13kg扭力180度金屬舵機帶動推力球軸承扭動,從而達到上下平面旋轉,很好減少摩擦,設計非常合理!可用於機械臂等需要不同平面扭動的結構。
●直徑:120mm
●高度:50mm(可選)
●顏色:銀白色or黑色
舵機線序:棕線電源負,紅線電源正,黃線控制信號 
舵機原理 http://wenku.baidu.com/view/01762668a98271fe910ef978.html
產品參數
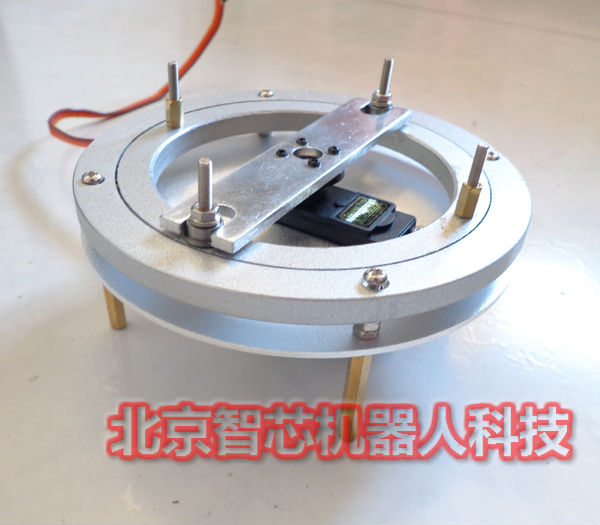
1、材質:全鋁合金結構,銅合金支腳;三軸承均使用軸承鋼滾珠,全封閉結構,自潤滑免維護,大轉盤軸承主材高硬度鋁合金,兩個小杯士軸承主材軸承鋼。
2、幾何參數:最大直徑120mm,總高度55~65mm(可調),不含支腳的盤形零件裝配高度為25mm。雲台旋轉角度無機械限制,僅取決於電機可旋轉角度。
3、重量和承載力:含舵機總重量約370g,可承重10kg以上。
4、電參數:帶一個可180度旋轉的MG995全金屬齒13KG·CM大扭矩機器人專用舵機,驅動電壓5~7.2V,最大電流2A。
全部是6061硬鋁合金


數字(數碼)舵機和模擬舵機的區別
數字舵機(Digital Servo)和模擬舵機(Analog Servo)在基本的機械結構方面是完全一樣的,主要由馬達、減速齒輪、控制電路等組成,而數字舵機和模擬舵機的最大區別則體現在控制電路上,數字舵機的控制電路比模擬舵機的多了微處理器和晶振。不要小看這一點改變,它對提高舵機的性能有著決定性的影響。
數字舵機在以下兩點與模擬舵機不同:
處理接收機的輸入信號的方式;
控制舵機馬達初始電流的方式,減少無反應區(對小量信號無反應的控制區域),增加分辨率以及產生更大的固定力量。
模擬舵機在空載時,沒有動力被傳到舵機馬達。當有信號輸入使舵機移動,或者舵機的搖臂受到外力的時候,舵機會作出反應,向舵機馬達傳動動力(電壓)。這種動力實際上每秒傳遞50次,被調製成開/關脈衝的最大電壓,並產生小段小段的動力。當加大每一個脈衝的寬度的時候,如電子變速器的效能就會出現,直到最大的動力/電壓被傳送到馬達,馬達轉動使舵機搖臂指到一個新的位置。然後,當舵機電位器告訴電子部分它已經到達指定的位置,那麼動力脈衝就會減小脈衝寬度,並使馬達減速。直到沒有任何動力輸入,馬達完全停止。
模擬舵機的“缺點”是:假設一個短促的動力脈衝,緊接著很長的停頓,並不能給馬達施加多少激勵,使其轉動。這意味著如果有一個比較小的控制動作,舵機就會發送很小的初始脈衝到馬達,這是非常低效率的。這也是為什麼模擬舵機有“無反應區”的存在。比如說,舵機對於發射機的細小動作,反應非常遲鈍,或者根本就沒有反應。
相對於傳統模擬舵機,數字舵機的兩個優勢是:
因為微處理器的關係,數字舵機可以在將動力脈衝發送到舵機馬達之前,對輸入的信號根據設定的參數進行處理。這意味著動力脈衝的寬度,就是說激勵馬達的動力,可以根據微處理器的程序運算而調整,以適應不同的功能要求,並優化舵機的性能。
數字舵機以高得多的頻率向馬達發送動力脈衝。就是說,相對與傳統的50脈衝/秒,現在是300脈衝/秒。雖然,以為頻率高的關係,每個動力脈衝的寬度被減小了,但馬達在同一時間裡收到更多的激勵信號,並轉動得更快。這也意味著不僅僅舵機馬達以更高的頻率響應發射機的信號,而且“無反應區”變小;反應變得更快;加速和減速時也更迅速、更柔和;數字舵機提供更高的精度和更好的固定力量。
具體的對應關係如下表。
| 180度舵機 | 360度舵機 |
| -90度 | 反轉最大轉速 |
| -45度 | 反轉速度50% |
| 0度 | 停止 |
| 45度 | 正轉速度50% |
| 90度 | 正轉最大轉速(6V/77rpm空載) |