產品說明4
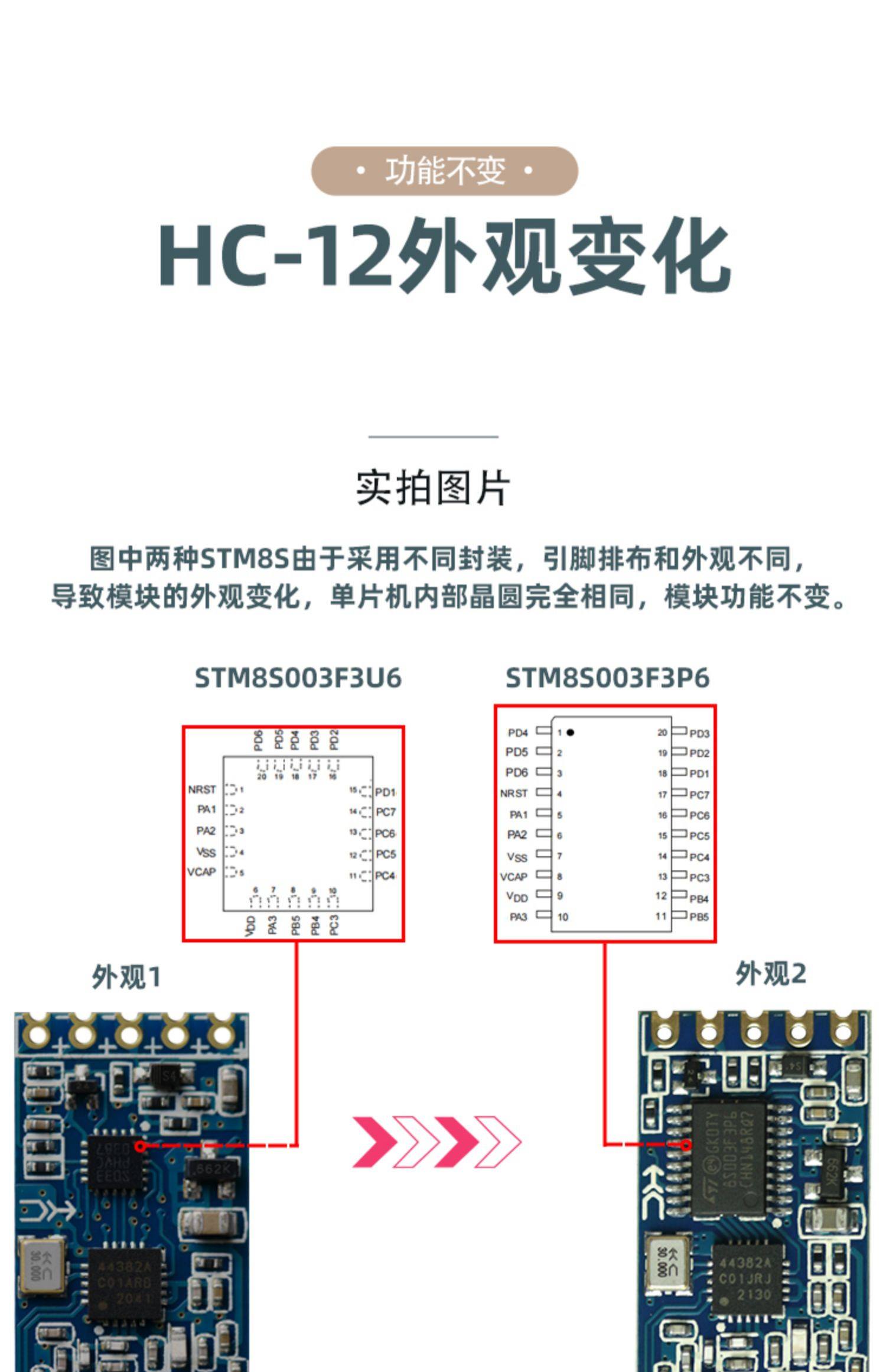
【新版本說明】---現在12模塊有更換芯片的了,功能兼容之前的


相關文件
HC-12規格書下載鏈接:
https://pan.baidu.com/s/1Ki__Qu_r3oaYY8z2VKvAxA
http://www.wavesen.com/downloadDis.asp?id=44
【舊版本說明】---已停產

HC-12規格書下載鏈接:
http://www.wavesen.com/downloadDis.asp?id=44
PS: HC-11不能與HC-12連接通訊,他們各自獨立工作,成對使用。
1:供電電壓3.2V~5.5V。(如果模塊要長時間工作在發射狀態,建議當電源電壓超過4.5V時串接一個1N4007二極管,避免模塊內置LDO發熱)
2:默認通訊距離(開闊地測試):600m左右(通訊距離最高可調達到1000m,空中波特率5000bps)。
3:默認空閒電流:16MA(模塊在不同的工作模式下的工作電流不同)。
4:模塊尺寸:27.8mm×14.4mm×4mm。
5:工作頻率範圍(433.4—473.0MHz,多達100個通信頻道)最大100mW 發射功率(可設置)
6:模塊支持軟件升級。(我們為客戶提供升級軟件)
7:默認出廠設置:工作模式FU3,波特率9600bps,通訊頻道CH001(433.4M)。



=======================
產品特性:
HC-12模塊有三種串口透傳模式,用FU1 、FU2和FU3表示。使用時,各種模式都是只管收發串口數據即可,不用管空中無線傳送部分。系統默認工作在FU3全速模式下,此模式可以根據串口波特率自動調節空中波特率,在低波特率下通信距離最遠。不同模式是不能互傳數據的,用戶可以根據實際情況選擇最優模式。
使用時一般不限定一次連續往模塊串口發送的字節數。但鑑於環境干擾等因素,一次連續發送大量數據時,有可能會丟失一些字節。所以,上位機最好要有應答和重發等機制,避免信息丟失。
1:FU1
此模式為較省電模式,此時模塊的空閒工作電流為3. 6mA左右。此模式下模塊同樣可以設置如下面表格所示的8種串口波特率,但空中波特率統一為250000bps 。
2:FU2
此模式為省電模式,此時模塊的空閒工作電流為80μA 左右。此模式下模塊只支持
1200 bps、2400 bps 和4800 bps 的串口波特率,空中波特率統一為250000bps。設置成其它
串口波特率,模塊不能正常通信。同時,在FU1和FU3模式下設置為FU2模式時,超過4800 bps的串口波特率一律會被自動降低為4800 bps。(經檢測,此模式下傳輸數據的時候有少許BUG,暫時不建議用戶使用FU2模式,我們會第一時間修改BUG,更新程序。)
3:FU3
模塊工作於全速狀態下,空閒工作電流為16mA左右。在此模式下,模塊會根據串口波特率自動調節無線傳輸空中波特率,其對應關係如下表所示:
| 串口波特率 | 1200bps | 2400bps | 4800bps | 9600bps | 19200bps | 38400bps | 57600bps | 115200bps |
| 空中波特率 | 5000bps | 15000bps | 58000bps | 236000bps |
為了使通信距離盡量遠,可以把串口波特率設為低波特率。如果是短時間傳送大量數據,則把串口波特率設為高波特率,但要犧牲通信距離。
不同空中波特率條件下模塊的接收靈敏度如下表所示:
| 空中波特率 | 5000bps | 15000bps | 58000bps | 236000bps |
| 無線接收靈敏度 | -117dBm | -112dBm | -107dBm | -100dBm |
一般來說,接收靈敏度每下降6dB,通信距離會減少一半。
下面給出各種模式的一些特性參考值:
| 模式 | FU1 | FU2 | FU3 | 備註 |
| 空閒電流 | 3.6mA | 80uA | 16mA | 平均值 |
| 傳送延時 | 4~80mS | 500mS | 4~80mS | 發一個字節 |
| 回環測試1 | 31mS | | | 串口波特率9600,發一個字節 |
| 回環測試2 | 31mS | | | 串口波特率9600,發十個字節 |
注:回環測延時是指,短接一模塊的TX與RX引腳,發串口數據給另一模塊,從開始發送串口數據計起到另一模塊TX引腳出現返回來的數據的這段時間。
AT指令集:
模塊參數設置AT指令
AT指令用來設置模塊的參數和切換模塊的功能,設置後需退出設置狀態才生效。同時,參數和功能的修改,掉電不會丟失。
(1)指令模式的進入
第一種進入方式——正常使用(已經上電)中,把第5 引腳“SET”置低電平;
第二種進入方式——斷電,第5 引腳“SET”先置低電平再重新上電。
這兩種方式都能使模塊進入AT指令模式,釋放(“SET”引腳不接低電平)則退出指令模式。退出指令模式後,如果更改了模塊功能,則會切到相應的功能態。
第二種方式固定以9600,N,1 的串口格式進入AT。
(2)指令說明
① AT
測試指令
例:
發給模塊指令“AT”,模塊返回“OK”。
② AT+Bxxxx
更改串口波特率指令。可設置波特率為1200bps、2400bps、4800bps、9600bps、19200bps 、38400bps 、57600bps和115200bps。出廠默認為9600bps。
例:
設置模塊串口波特率為19200bps ,請發給模塊指令“AT+B19200 ”,模塊返回
“OK+B19200”。
③ AT+Cxxx
更改無線通信的頻道,從001到127可選(超過100以後的無線頻道,通信距離不作保證)。無線頻道默認值為001,工作頻率為433.4MHz。頻道的步進是400KHz,頻道100的工作頻率為473.0 MHz。
例:
設置模塊工作到頻道21,請發給模塊指令“AT+C021 ”,模塊返回“OK+C021”。
退出指令模式後,模塊工作在第21通道,工作頻率為441.4 MHz。
注意:由於HC-12模塊的無線接收靈敏度比較高,當空中波特率大於58000 bps時,必須要錯開5個相鄰頻道來使用。當空中波特率不大於58000 bps時,如果短距離(10米以內)通信,也需要錯開5個相鄰頻道使用。















