產品說明0


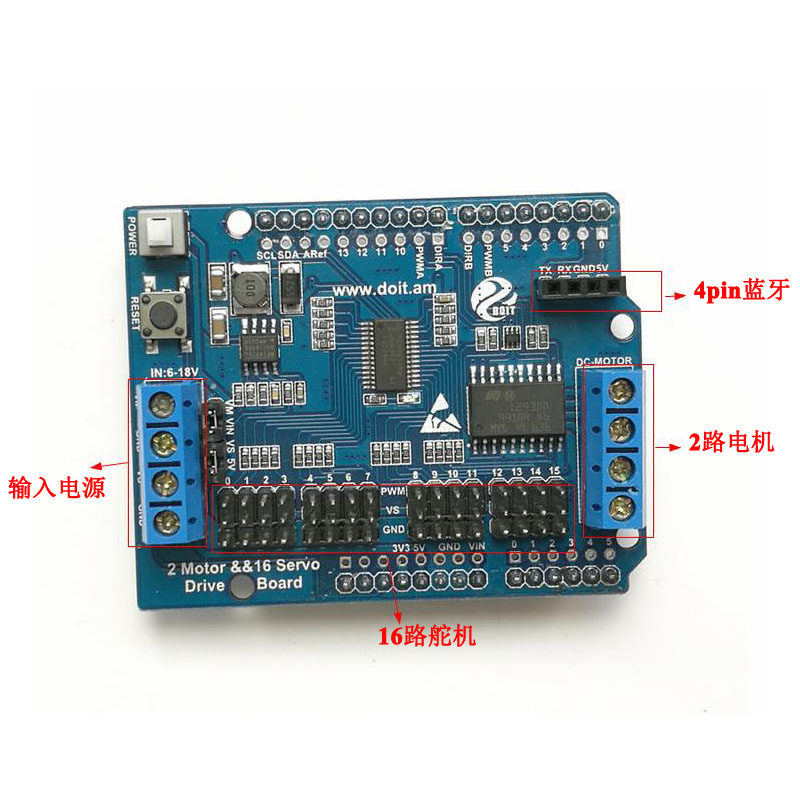
2 Motor && 16 Servo Drive Shield是兼容Arduino UNO和ESPduino的一款電機和舵機驅動模塊。模塊採用疊插式線路板設計,可以直接接入Arduino UNO 或者ESPduino線路板。該產品可以同時控制2 路直流電機(4.5 ~36V )和16 路舵機(5 ~18V ),適合於裝有機械臂的移動機器人驅動控制。
模塊採用意法半導體公司生產的優秀大功率電機專用驅動全橋芯片L293DD,可直接驅動2路直流電機或者1路步進電機,驅動電流最大可以達到1.2A。電路圖佈局合理、貼片封裝、安裝十分方便。模塊採用IIC接口控制16路舵機。
模塊採用Arduino UNO和ESPDUINO的IO口作為控制端口,因此僅僅佔用控制板D6、D7、D8、D9(對於ESPDUINO,則為D12、D13、D14、D15)四個端口,分別作為PWMB(電機B轉速)、DIRB(電機B方向)、PWMA(電機A轉速)、DIRA(電機A方向) 功能。模塊採用人性化設計方案,使用電源按鈕開關,用戶可以方便地進行電源開關。本模塊可以直接用於控制智能機器人,採用藍牙(預留直插接口)或者wifi控制,參考控制UNO源碼見附件。
產品技術規格:
- ①電源輸入:
- 電機電源(VM):4.5V~36V,可單獨供電;
- 舵機電源(VIN):5~18V,可單獨供電;
- ②單電源供電使用辦法:
- 斷路VM和VIN,單獨控制電機,6~36V);
- 斷路VS和VIN,單獨控制舵機(6~18V);
- 短路VM和VIN,同時短路VS和5V。同時控制電機(6~18V)和16路5V舵機
- ③電機驅動部分工作電流Io:≤1.2A;
- ④最大耗散功率:4W(T=90℃)
- ⑤控制信號輸入電平:
- 高電平:2.3V≤VIH≤VIN;
- 低電平:-0.3V≤VIL≤1.5V
- ⑥工作溫度:-25℃~+125℃
- ⑦驅動形式:雙路大功率H橋驅動
- ⑧模塊重量:約46g
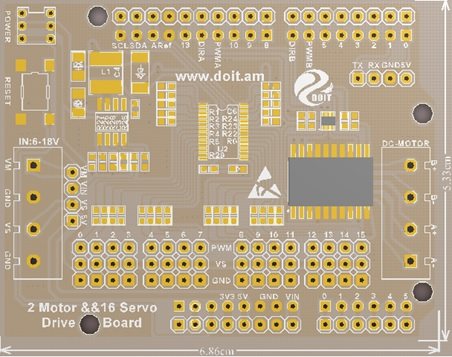
機械尺寸: 下圖為本產品的PCB視圖





2路電機與16路舵機拓展板可以同時驅動2路電機與16路舵機,本示例使用手機app控制小車和每路舵機。
1.工作流程:
ESPduino建立AP熱點->監聽UDP廣播->手機連接該熱點->手機app使用udp廣播控制數據->espduino收到數據解析數據控制小車和舵機。
2.控制協議為
1)小車控制:
cmd=motor&d=x, (x=0 1 2 3 4 5 6 A)
例:cmd=motor&d=5小車速度增加100
- 0 停止
- 1 前進
- 2 後退
- 3 左轉向
- 4 右轉向
- 5 速度增加100
- 6 速度減少100
- A 回复App當前速度值
2)舵機控制:
cmd=servo&n=舵機號&d=轉動角度
例:cmd=servo&n=0&d=300控制0號舵機轉動
舵機號範圍0-15
轉動角度範圍130-590對應0-180度,不同型號的舵機範圍可能不一樣
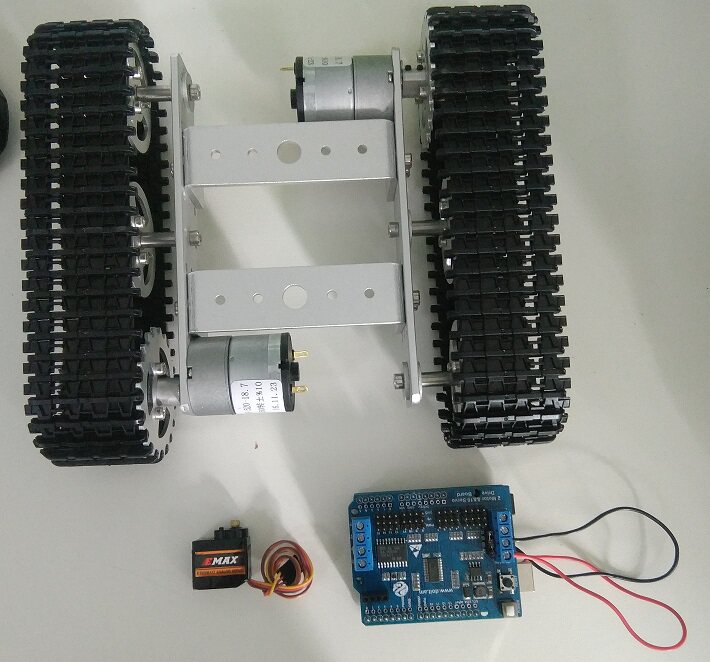
3.物料準備: (需要的東西)
- ESPduino *1
- 2路電機與16路舵機拓展板*1
- 跳線帽*2
- 電源*1
- 小車*1
- 5v舵機若干
4.實驗步驟:
1)安裝
- a) 將兩個跳線帽分別短接VM與VIN,VS與5V
- b) 將電源接入VM與GND
- c) 把小車兩路電機分別接在A+A-,B+B-
- d) 將庫文件添加到ide庫文件目錄中,將附近中的源碼燒寫進espduino
- e) 將拓展版安裝在ESPduino上
- f) 打開拓展板上的白色開關,兩塊板子led燈均會亮起
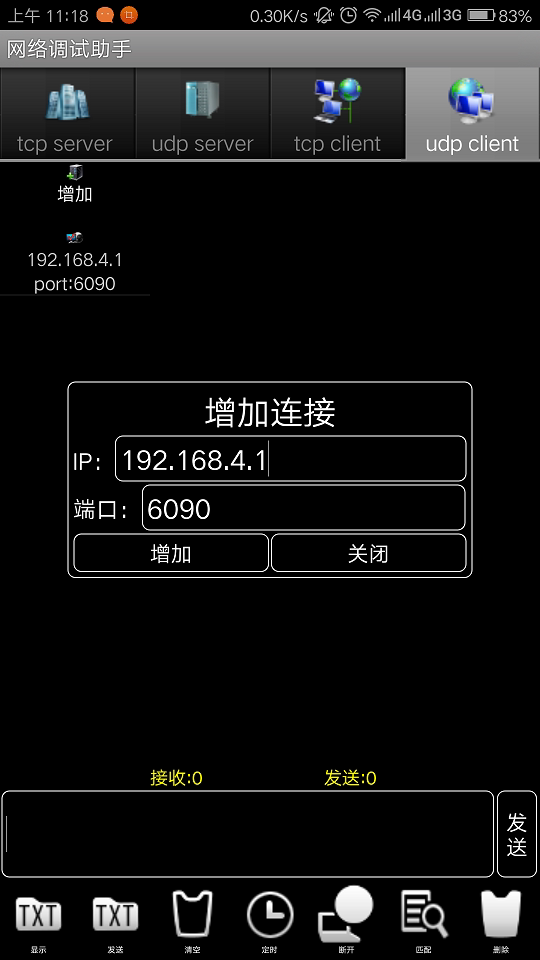
2)手機控制
- a) 安裝手機app
- b) 打開手機wifi連接Doit_Servo_XXXX(XXXX為chipID)的熱點,密碼12345678
- c) 打開app,選擇UDP client,點擊添加,鍵入ip192.168.4.1,端口6090
- d) 輸入控制協議裡的指令開始控制小車,如cmd=motor&d=5小車速度增加100