產品說明0

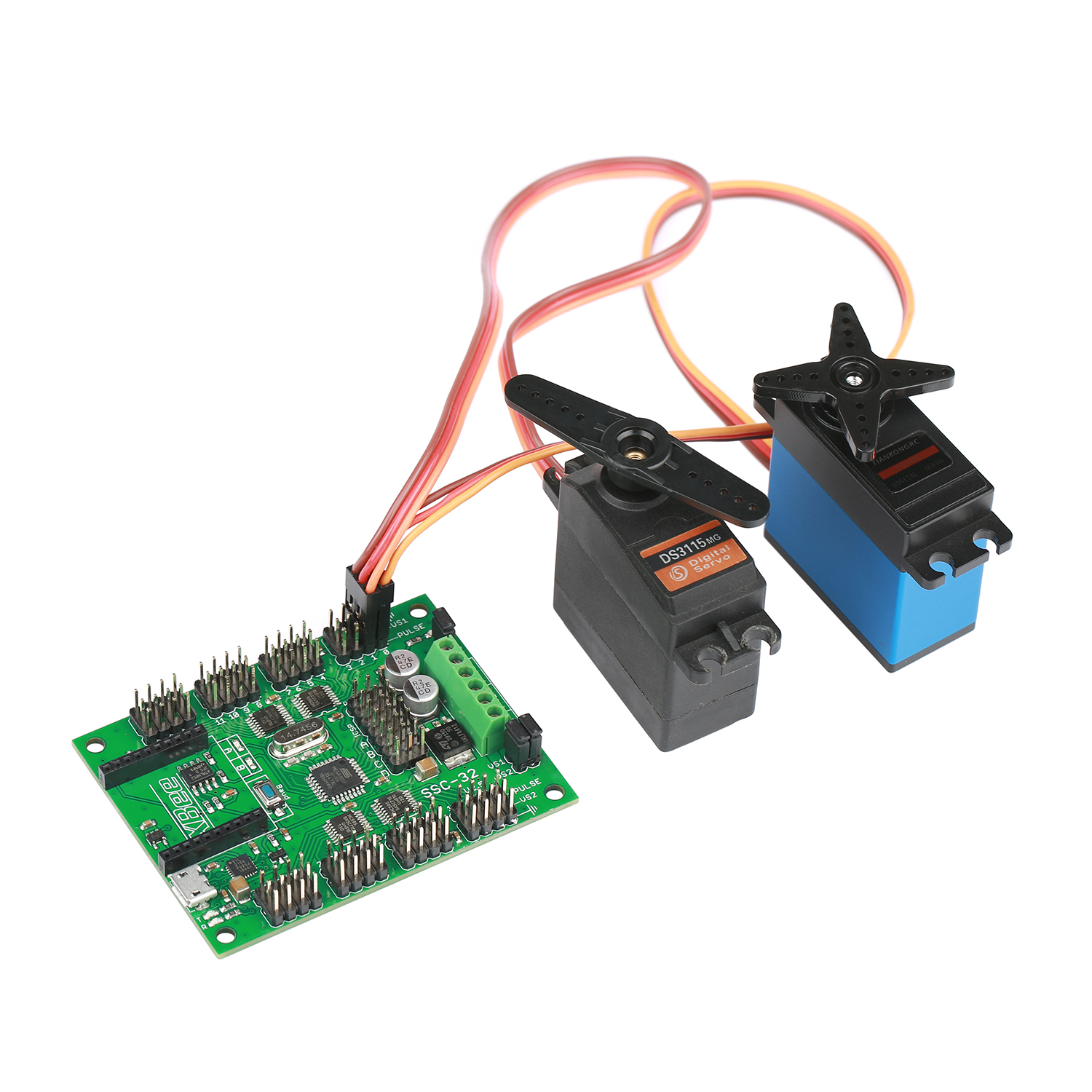

USBSSC32 路舵機控制是專為人形機器人、蜘蛛機器人、機械手等多舵機使用而量身定做的。多路舵機控制器。該控制器不但保留了原版的所有功能,還在原版的基礎上作了升級,將原來的RS232 串口改成了USB 接口,方便電腦沒有串口的用戶使用。控制器還增加藍牙接口,可實現無線遠程控制。USBSSC32 路舵機控制控制方式包括實時、定時、定速控制等,與lynxmotion 的控制軟件完全兼容。
產品參數
1.輸出通道:32 路(脈沖調制輸出或TTL 電平輸出);
2.舵機供電:根據所接舵機額定電壓供電,典型DC4.8V~6V;
3.邏輯供電:DC6V~12V 或USB 供電(具有自恢復保險絲,調試時使用);
4.驅動分辨率:1uS, 0.09°;
5.驅動速度分辨率:1uS/秒,0.09°/秒;
6.通訊接口:USB/TTL 串口接口;
7.串口波特率:2400、9600、38.4k、115.2k 可設置;
資料鏈接:(複製至瀏覽器)
獨家上位機軟件,只需輕點鼠標即可完成機器人、機械手控制,自帶256kbit容量存儲芯片,支持脫機運行。















即可
產品規格
1. 16-31號舵機信號控制引腳,其中G表示GND(黑色排針);V表示VCC(紅色排針);S表示信號控制引腳(白色排針)。使用時不要把線接反。
2. 0-15號舵機信號控制引腳,其中G表示GND(黑色排針);V表示VCC(紅色排針);S表示信號控制引腳(白色排針)。使用時不要把線接反。
3. 主控制芯片,採用DIP28 腳的Atmega8L 單片機,工作頻率14.7456MHZ。
4. 16-31號舵機控制電源輸入,可以用來驅動一般的模擬或者是數字舵機。工作電壓4.8V -6V,可以使用5片鎳氫電池組供電,其中VS2接電源正極,GND接電源負極。
5. 0-15號舵機控制電源輸入,可以用來驅動一般的模擬或者是數字舵機。工作電壓4.8V -6V,可以使用5片鎳氫電池組供電,其中VS1接電源正極,GND接電源負極。
6.邏輯供電輸入端,輸入電壓範圍7.5-15V,通過內部的降壓給電源提供穩定的5V電源,其中VIN接電源的正極,GND接電源的負極。
7. 通信速率選擇,通過兩組指撥開關選擇不同的通信波特率,對應關係如下:
| ON ON | 115200 | ON OFF | 9600 |
| OFF ON | 38400 | OFF OFF | 2400 |
8. ABCD 四組模擬/數字輸入端子,可以設置為靜止或者是鎖存。
9. FT232rl 通信芯片,提高通信的穩定性。
10. 串口選擇,默認通過跳線帽連接T、R 引腳,去除引腳可以將串口留作它用。
11. USB 接口,用來連接控制板到電腦。
12. 內部降壓模塊,採用78D05 降壓模塊為控制單元提供穩定的5V 電源。
13. 擴展功能,暫時用不到。
14. 藍牙接口,可以通過額外的藍牙模塊輕鬆實現無線控制。
15. VS1與VS2短接跳線,當兩組都插有跳線時,VS1=VS2.這時只需要在VS1或者VS2任意輸入一組舵機電源即可;如果去除跳線,VS1與VS2為兩組不同的電源輸入,不同的舵機電源從VS1與VS2分別輸入。

單個舵機運動實例:
void setup()
{
Serial.begin(115200);//32 路舵機控制器撥碼開關都置1
}
void loop()
{
Serial.println("#0 P750 T500");// 舵機接到0 號口
delay(1000);
Serial.println("#0 P2200 T500");
delay(1000);
}















