產品說明0


【一句話自我介紹】
我是專為樹莓派設計的兩自由度雲台擴展板,板載PCA9685芯片和TSL2581環境光傳感器,通過I2C接口控制即可實現雲台轉動和光強檢測。
【我的特點】
- 基於Raspberry Pi 40PIN GPIO接口設計,適用於Raspberry Pi系列主板、Jetson Nano
- I2C接口控制,僅需2根信號線,即可實現雲台轉動和光強檢測
- 板載PCA9685芯片,可輸出12位分辨率的PWM控制雲台轉動
- 板載TSL2581FN,內置ADC,能夠得到近似人眼對光的反應,輔助模塊工作
- 板載電平轉換電路,可兼容3.3V/5V的工作電平
- 配套專用亞克力板用以固定樹莓派攝像頭,安裝簡單方便
- 提供完善的配套資料手冊(示例程序、用戶手冊等)
【我的參數】
- PWM驅動芯片:PCA9685
- PWM分辨率:12位
- 環境光傳感器:TSL2581FN
- 環境光分辨率:16位
- 通信接口:I2C
- 工作電壓:3.3V/5V
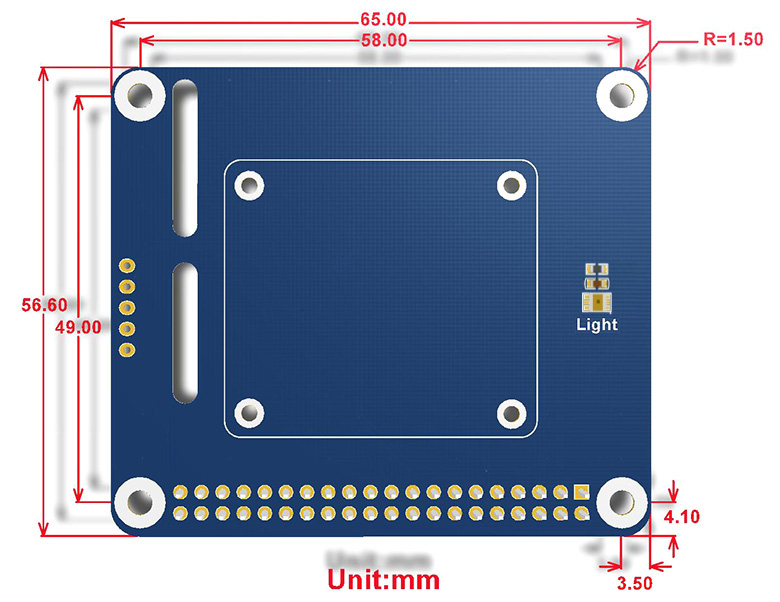
- 產品尺寸:56.6mm × 65mm
產品圖片


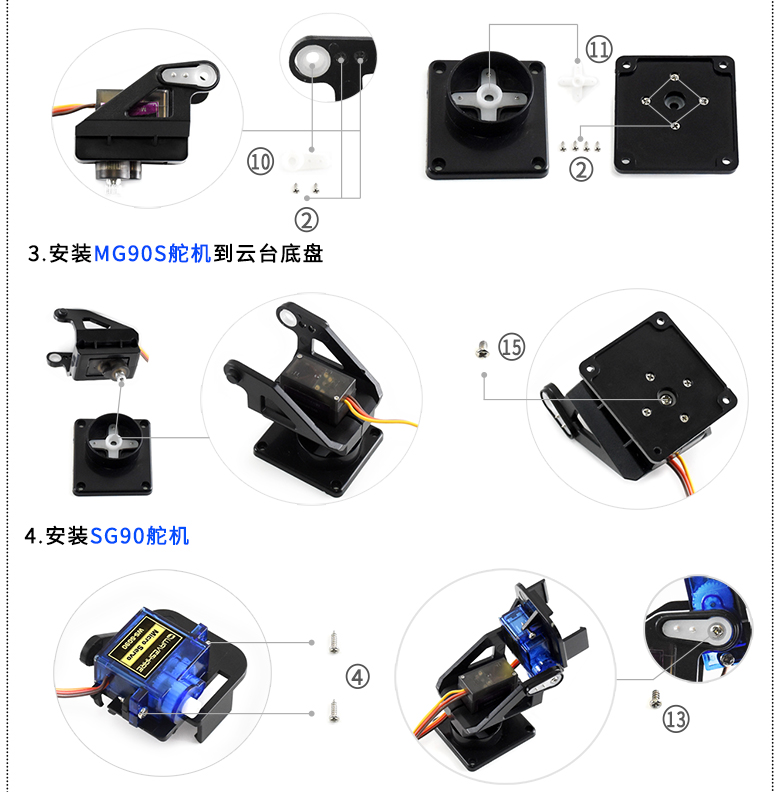
組裝圖解
組裝視頻參考1分19秒:http://www.waveshare.net/wiki/AlphaBot2-PiZero-Video
A:平移舵機 B:傾斜舵機


產品資料
資料包括:
路徑: www.waveshare.net/wiki/Pan-Tilt_HAT
外形尺寸
詳細配置
- Pan-Tilt HAT × 1
- 兩自由度雲台組件× 1
- SG90舵機× 1
- MG90S舵機× 1
- 亞克力板× 1
- M2螺絲包× 1
- RPi銅柱包(2PCS套) × 1
相關文件
路徑: www.waveshare.net/wiki/Pan-Tilt_HAT
其他攝影機如何組裝
模組配件提供了一包M2的獨立螺絲包,總共5顆螺絲10個螺帽,相機全部是先給相機上好M2螺絲,抬高相機然後再連接壓克力板,將壓克力板使用螺絲鎖好.
RPi Camera V2
RPi Camera (E)、RPi Camera (G)、RPi Camera (F)、RPi Camera (J)、RPi Camera (M)
RPi Camera (H)
RPi NoIR Camera V2
RPi IR-CUT Camera(由於此相機孔位是非標準的,所以只能鎖上兩顆)

[FAQ]:
Q1問題:能否精密控制轉動角度?
A1:無法做到精密控制,這個只是入門的。
Q2問題:為什麼抖動?
A2:輕微的抖動是正常的,由於舵機轉動的實際角度小於舵機轉動的最小物理角度,此時會有電流維持他的角度,就會引起抖動。
Q3問題:為什麼掃描I2C位址會出現三個I2C設備位址?
A3:使用的控制晶片對應的是PCA9685,在上電的時候,是有兩個I2C位址的,
一個是根據板載的電阻配置的位址,預設的是0X40,
一個是0X70這個是ALLCALLADR寄存器配置出來的I2C位址,運行一遍例程即可清楚暫存器的值。還有一個I2C位址是環境光感測器的,它對應的是0x39
Q4問題:突然有一個舵機不能轉動?
A4:
- 1.偵測舵機線是否接錯
- 2.兩個舵機的接線介面交換一下看看是否是舵機的問題還是有一個介面沒有輸出。
- 3.先將其他配件拆除測試一下舵機是否轉動
- 4.手上有其他樹莓派的話,可以更換另外的樹莓派測試一下,有可能是樹莓派腳出現了問題
- 5.更換新的樹莓派系統測試一下,可能是系統進行了某些配置導致的,用純淨的系統測試一下















