▼奧松 32路伺服電機控制器 32路舵機控制器 機器人控制板 機器人配件


本產品是一套最具性價比的伺服電機控制器。可以控制多達32個伺服電機協調動作,具有位置控制以及速度控制,既可以用PC機做上位機通過軟件控制,也可以添加其他模塊脫機工作。
通過PC機操作上位機軟件給控制器傳遞控制指令信號,即可實現多路伺服電機單獨控制或同時控制。也可以用帶串口的微處理器作為上位機組合使用,控制指令精簡,控制轉角精度高,波特率可以實時更改,體積小,重量輕,其可作為類人型機器人、仿生機器人、多自由度機械手的主控制器。
隨著中國機械產業的不斷進步,各高校相繼開設機械類創新課程和比賽,學生可將其應用在各類機械創新作品中,優化控制系統參加比賽。

32路伺服電機控制器功能圖解
本產品採用高性能、低功耗的 8 位AVR? 微處理器,指令執行時間為單個時鐘週期,速度快,控制精度高、I/O口驅動能力更強,優於AT51、STC51系列單片機;
抗干擾PCB佈局,雙面貼片設計,使控制器體積大大縮小,減輕了機器人整體重量;
USB取電設計,方便調試,可直接接插筆記本電腦或台式電腦USB接口;
四種常用波特率可通過撥碼開關選擇,避免了跳線帽鬆動丟失,造成通訊異常的情況,大跨度波特率數值,使上位機選擇上更加寬廣,可選用51、AVR、PIC、DSP等單片機或者Basic Stamp、Arduino做上位機,諸多優點,顯而易見.........

32路舵機控制器整體預覽

產品組件:控制器上位機軟件及使用說明書光盤

產品參數:
1. 控制部分端子供電範圍:+7V—+12V。
2. 控制部分DC插頭供電範圍:USB取電或DC直流5V電源。
3. 伺服電機端子供電範圍:+4-+6V。
4. 控制通道:32路。
5. 通訊輸入:RS232(串口)或TTL。
6. 伺服電機驅動分辨率:大約1us , 約0.09度。
7. 波特率設置:2400 9600 38.4k 115.2k 可以轉換。
8. 支持的伺服電機: Futaba or Hitec 以及國產品牌如輝盛等。
9. PC接口: DB9F。
10. 尺寸:65mm×60mm×1.5mm。/ 固定孔:M3 * 4個
11. 控制方式:串口接受命令方式。(附送上位機軟件控制或帶串口的微處理器)
12. 其他:提供外擴上位機系統供電接口。
13. 脈衝寬度調節範圍:500us — 2500us
14. 指示燈:舵機供電指示燈(綠色)、運行指示燈(紅色)
中文版調試控制器軟件:

免費提供上位機控制軟件,我們會不定期為客戶免費更新,09版軟件功能與界面更加人性化,不但包括08版軟件的所有功能,而且增加了以下功能:
1、速度控制設定功能:可以調試出任意速度,多路電機不同速度運行穩定,實時性好,速度精準,加速減速任意設。
2、循環控制功能:讓您不必費心點擊鼠標啦,反覆調試更加易用,可作為小型工業機械手主控板,功能循環執行,提供作業效率。
3、指令保存功能:可以將您調試好的指令集保存,自動生成指令文檔,日期時間準確,例如robotcode20090107_1550,您也可以個性化自命名,避免讀取指令文檔錯誤或者重新編輯。
4、指令讀取功能:只要輕鬆點擊「打開指令」按鍵,會進入指令集文檔,選擇您要讀取的以往指令文檔,恢復當前功能設置。
5、控制動作完成時間功能:只要發送指令時間大於動作完成時間,您就可以任意設置動作的完成時間,軟件備有自動調整功能,可將電機轉動平滑過渡,避免了機器人定格控制缺陷。
6、串口調試助手:09版軟件集成了常用的串口調試助手軟件,不必再因打開其他調試軟件浪費時間了,「發送」、「清除」輕鬆點擊更加易用。
7、藍牙識別功能:09版軟件中集成藍牙識別驅動軟件,可以添加藍牙模塊,實現無線遠程控制。
使用方法 控制器接口介紹
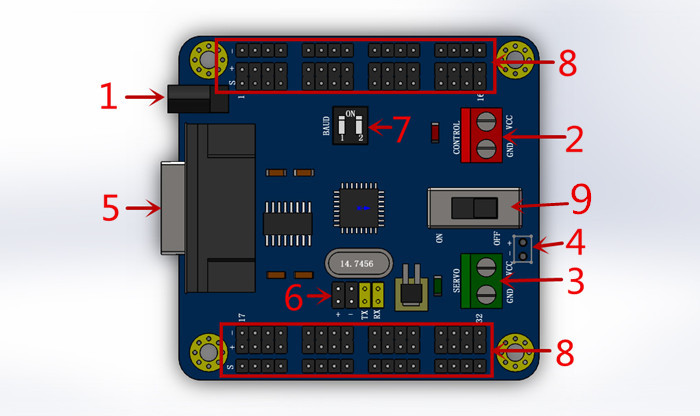
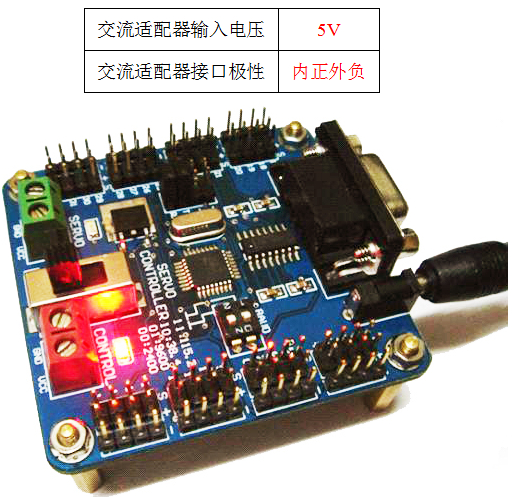
- 1號位置:DC - 5V 直流電源接口
- 此接口用於直接使用USB 供電線給舵機控制器的芯片進行供電。下圖是使用USB 供電線給舵機控制器進行供電,當控制器插上USB 供電線時,控制端口指示燈亮起。
==================
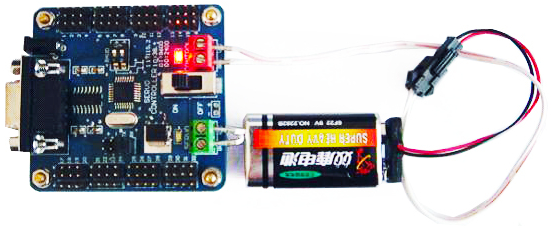
- 2號位置:控制部分電源端子接口
- 此接口用於接插控制器控制部分供電電源,為增大選擇電源電壓範圍,特設此接口。下圖是使用9V電池給控制部分端子供電。 工作電壓範圍:+7V—+12V。
- 注意:連接電源之前,要確認好端子接口的正負標識符,正確接線,避免接反而損壞控制器。1號位置和2號位置不能同時連接,同時給芯片供電!
==================
3號位置:伺服舵機供電電源端子接口
此接口用於接插伺服舵機供電電源。
工作電壓:+4V-+6V(普通伺服舵機),若使用大功率伺服舵機,建議單獨供電,避免長時間使用,致使板線發熱造成燒毀。
功率注意:由於不同型號的伺服電機的耗電不同,而且運行在帶負載時,耗電也不同,所以請以實際使用為準。
一般情況下,伺服舵機啟動和滿負載的時候耗電達1A~1.5A,而沒有負載時候只有約150mA耗電,所以請均衡考慮,根據同時運動的伺服舵機數量,來考慮電源的功率選擇。
為防止意外,電源的選擇上,請確保不要使用功率小於設計中一半數目的電機滿功率運行時的功耗。
下圖中使用了一個4節5號電池盒給舵機控制器舵機供電端子進行供電。

==================
此接口供電來源控制部分端子接口電源,可為自主開發的上位機(51系列、AVR系列、DSP、ARM、Arduino等)板供電。備註:由於排針位置不使用時,容易造成短路,所以新升級的產品上沒有焊接這兩個針腳,但此功能正常,客戶如需要使用,可以自行焊接排針,用於給自己的上位機供電,如下圖所示:

==================
此端口使用標準RS232串口電平進行通訊,可以接插USB-RS232通信線或串口通信線和計算機進行通訊,接收實時控制指令。
下圖是使用USB轉RS232接口線連接32路舵機控制器和PC上位機的。

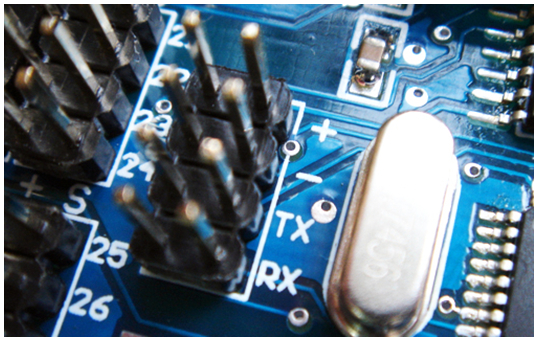
6號位置:TTL 通信接口
- 若使用此功能請將跳線帽取下,此接口可用於伺服舵機控制器與其他單片機開發的上位機通信。
注意:要使用32路舵機控制器的TX RX引腳與上位機進行通信,需要將接線接到靠近芯片一側的引腳上。
==================
7號位置:波特率設置撥碼開關
- 通過設置撥碼開關,波特率可以在2400 9600 38400 115200四種數值中轉換。
- 注意: 1代表ON,0代表OFF。具體對應關係:11 - 115200; 10 - 38400; 01 - 9600; 00 - 2400,每次更改波特率數值後,都要給控制器重新上電啟動,才會生效。控制器波特率默認設置為115200。

==================
8號位置:伺服舵機通道接口及標識符
- 此接口可接插國際標準接口的伺服舵機,包括模擬式和數字式兩種。接口側方有1~32 通道的標註符,表示伺服電機受哪一通道信號控制。每一行可以接插一個伺服電機。整行接口上面有S/ + /- 的標註,其中“-”表示接插伺服電機的地線(一般為黑色);“+”表示接插伺服電機的電源線(一般為紅色);“S ”表示signal(信號)接插伺服電機的控制信號線(一般為橘黃色或白色)。
==================
- 9號位置:電源開關
- 此開關控制紅色端子(控制部分供電端子)和綠色端子(舵機部分供電端子)兩部分電源通斷。
開關撥向標有ON一端為接通電源;開關撥向OFF一端為切斷整個系統供電
















