產品說明0
此版本光流模塊和3DR PX4FLOW V1.31版本一致,需要配合PX4原生固件使用,APM固件無法使用,軟件方面尚不成熟,聲納定高穩定,但是光流定位效果一般,需要具備一定基礎的模友自己研究使用。

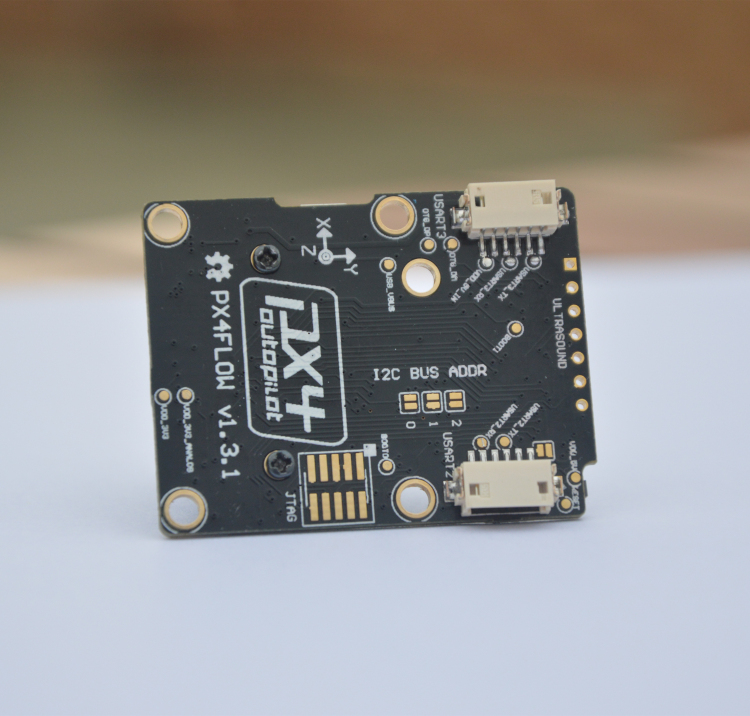

最新1.3.1版本,黑色沉金,二次開發確保和原版完全一致,請注意淘寶出現用1.3版本冒充1.3.1版本情況!正規1.3.1背部具有PX4 LOGO,且標有版本號,做工超越原版,保證硬件與原版一致。
官網介紹: http://pixhawk.org/modules/px4flow
PX4FLOW 是一款智能光學流動傳感器。傳感器擁有原生 752×480 像素分辨率,計算光學流的過程中採用了4倍分級和剪裁算法,計算速度達到250Hz(白天,室外),具備非常高的感光度。與其他滑鼠傳感器不同,它可以以120Hz(黑暗,室內)的計算速度在室內或者室外暗光環境下工作,而無需照明LED。你也可以對它重新編程,用於執行其他基礎的,高效率的低等級機器視覺任務。
硬件規格:
- STM32F405,168 MHz Cortex M4F(單精度浮點,128 + 64 KB RAM)
- 752×480 MT9V034 圖像傳感器, L3GD20 三軸陀螺
- 16 mm M12 鏡頭 (集成紅外濾光片)
- 外形尺寸: 45.5 mm x 35mm
- 功耗: 115mA / 5V
物品清單: PX4FLOW 1.3.1智能相機 1件,連接線1條。
相關文件
光流模塊出貨時都已經焊接好高精度聲納,圖像及光流數值全部檢測OK ,使用4pin線對接PIXHAWK I2C和光流模塊I2C.















